Cadeira de Rodas Autônoma – Iniciação Científica
Este ano (agosto) comecei uma I.C. e venho desenvolvendo uma cadeira de rodas autônoma. O objetivo final do projeto é ajudar os deficientes a se locomoverem na instituição que estudo. Para isto, a cadeira deve levar o cadeirante de um ponto ao outro da instituição com apenas 1 comando. A parte mecânica e elétrica da cadeira estavam bem adiantadas no início da I.C., visto que este é um projeto antigo do professor orientador.
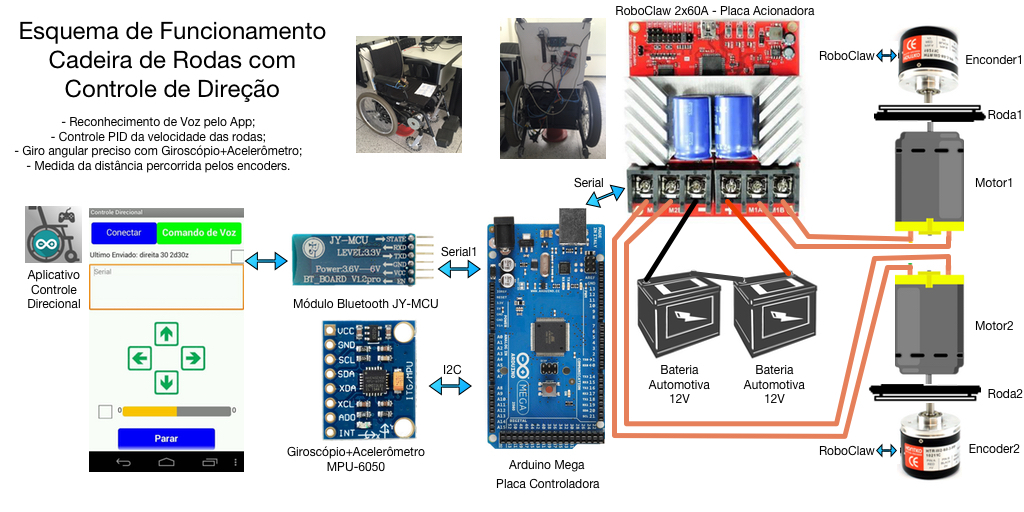
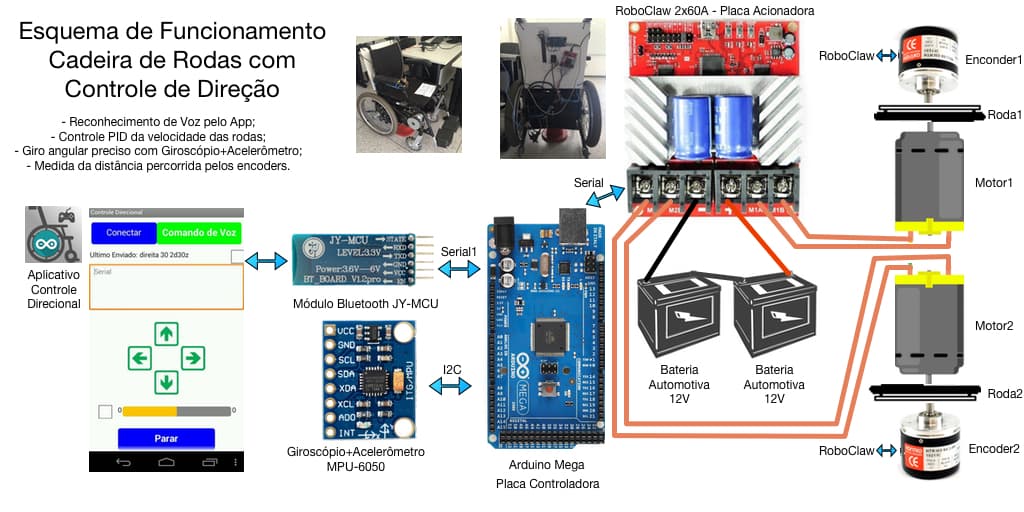
Começamos comprando uma placa acionadora para os motores:

Depois, compramos uma IMU que junta acelerômetro, giroscópio, barômetro e bússola.
A caideira está andando e sendo controlada manualmente por um controle de RF:
Tivemos dificuldades com o sensor GY-80 (IMU) no que diz respeito ao algoritmo e a precisão do angulo medido (YAW). Então, trocamos o GY-80 pelo MPU-6050 (Acelerometro e Giroscópio), o qual integra a aceleração e a velocidade angular para achar a posição angular (YAW), o que precisamos para “localizar” a cadeira.
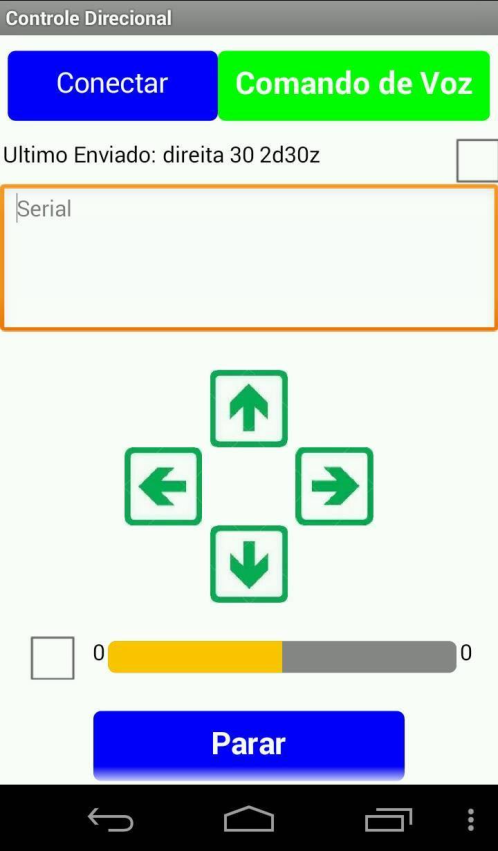
Também desenvolvemos um app que controla a cadeira via botões ou comandos de voz. O aplicativo se conecta à cadeira por bluetooth com o módulo JY-MCU (Arduino). Assim, enviamos os comandos para a cadeira e lemos as respostas (debug).
O aplicativo foi desenvolvido no AppInventor, o que facilitou o reconhecimento de voz e a comunicação via Bluetooth, por conta das funcionalidades embutidas em programação com blocos.
Podemos controlar a cadeira com comandos de voz:
“Direita+Angulo” “Esquerda+Angulo”
“Frente+Distância” “Trás+Distância”
Por meio dos botões:
Frente, Direita, Esquerda, Trás.
Ou ainda, por um slider controlando a direção esquerda direita.