Cadeira de Rodas Autônoma – TCC

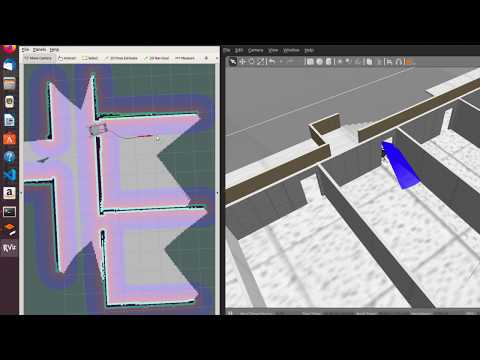
As cadeiras de rodas são as principais ferramentas de mobilidade para pessoas com capacidade de locomoção comprometida, seja por acidente, doença ou deficiência. Com o advento da tecnologia, as cadeiras de rodas motorizadas tornaram-se mais acessíveis e funcionais. Este trabalho tem como objetivo simular o controle direcional e a navegação autônoma de uma cadeira de rodas motorizada utilizando o sistema operacional robô (ROS), o simulador Gazebo e um algoritmo de localização e mapeamento simultâneo (SLAM). A simulação deste trabalho emula o hardware: Raspberry Pi3 + B como processador central do sistema (mestre), Arduino Mega (nó e driver), codificadores e um sensor de medição inercial (IMU) para odometria, o painel de controle do motor Roboclaw e power board da Microsoft Sensor Kinect para detecção visual.